| Главная » Статьи » Мои статьи |
| В категории материалов: 78 Показано материалов: 1-49 |
Страницы: 1 2 » |
Сортировать по: Дате · Названию · Рейтингу · Комментариям · Просмотрам
|
Новий частотний перетворювач WEG CFW500 в сучаному дизайні для будь-яких приводних застосувань. Завдяки потужності від приблизно від 180 Вт до 130 кВт перетворювач частоти серії CFW500 є високопродуктивним приводом змінного струму, що дозволяє регулювати швидкість і крутний момент трифазних асинхронних двигунів. Ключові особливості цієї серії: сучасний дизайн; три способи керування: векторний із датчиком швидкості, бездатчиковий векторний або скалярний; керування синхронними двигунами із постійними магнітами; SoftPLC (вбудовані функції програмованого логічного контролера); функції безпечного вимикання двигуна STO та SS1; спеціальний набір функцій Pump Genius для каскадного пуску насосного обладнання; можливість опціонального підключення додаткових модулів. Пристрій просто встановлювати і легко конфігурувати для конкретної приводної задачі завдяки РК-дисплею з інтуїтивно зрозумілим меню. На дисплей можна вивести індикацію до трьох параметрів перетворювача одночасно. CFW500 може бути підключений до промислової мережі передачі даних за протоколом CANopen, Profibus-DP, EtherNet/IP, Modbus-TCP, PROFINET IO або DeviceNet, в залежності від встановленого модуля зв’язку. Гнучкість конфігурації дозволяє створювати на основі перетворювачів частоти серії WEG CFW500 оптимізоване рішення для будь-якого застосування, такого як: екструдери; конвеєрні стрічки; поворотні столи; гранулятори/палетизатори; сушильні та роторні печі; дозувальні насоси; мішалки та міксери; намотувальні/розмотувальні машини та інше.
|

|
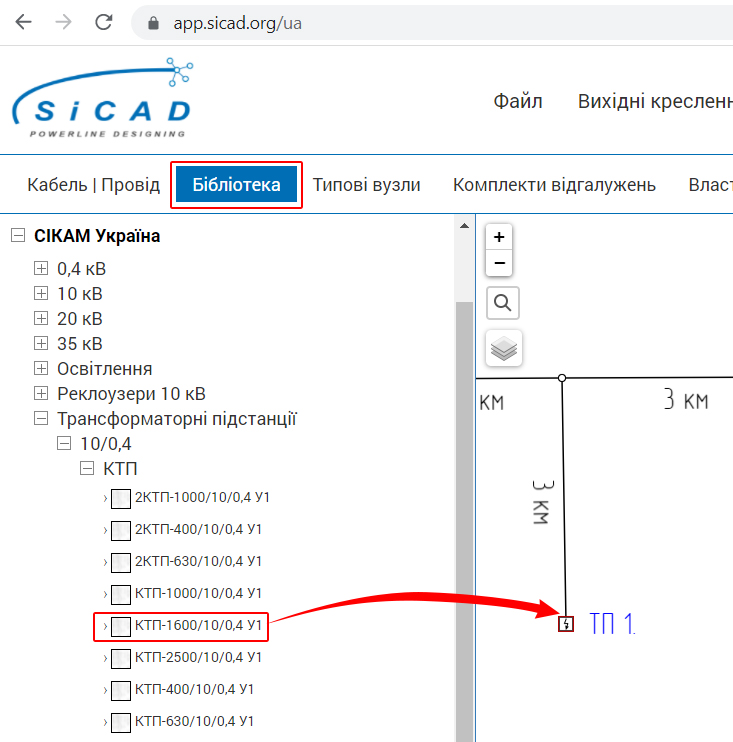
Нові функції SiCAD (https://app.sicad.org/ua) для виконання розрахунку електричних параметрів у електричних мережах 10 кВ. Розрахунок виконується за введеними значеннями коефіцієнтів завантаження трансформаторів або за розрахунковим навантаженням на стороні низької напруги 0,4 кВ. Розрахункові величини — струм, втрата напруги, відхилення напруги, розрахункова потужність.
|
|
Стрімкий розвиток електроніки швидко змінює наше життя, і ми помічаємо це, перш за все, у соціальній сфері, сферах комунікації (спілкування) та зв’язку. Перше, що спадає на думку у цьому зв’язку, – це комп’ютери, Інтернет і стільникові телефони. Ми вільні у пошуках необхідної інформації, маємо можливість вийти на зв'язок з бажаним абонентом, не зважаючи на наше місцезнаходження. Ми можемо отримувати дистанційну освіту і об’єднуватися у групи за професійними, соціальними або культурними інтересами. Все це стало можливим у значній мірі завдяки винаходу мікропроцесора і створенню мікропроцесорних систем. А чи є інші прояви прогресу мікроелектроніки, які не такі помітні, але виграють важливу роль у нашому житті? Так, мікропроцесори і мікроконтролери широко використовуються у побутовій техніці, автомобільній електроніці, аерокосмічній та військовій галузях і, звичайно ж, у промисловому виробництві. |
|
|

|
Компресорами називають машини, що призначені для стиску і нагнітання газу. Стиснуте повітря отримують за допомогою різного типу компресорів, які досить широко використовуються в різних галузях народного господарства, наприклад, в металургійній промисловості (домені печі), в нафтовій промисловості (нафтоперегінні заводи), в газотурбінних установках, холодильних установках і реактивних двигунах. Стиснуте повітря використовують також в різних пневматичних інструментах, в поршневих двигунах внутрішнього згорання для розпилу палива, запуску, продувки й ін. |
|
Кондиціонерами робочої рідини називають пристрої, призначені для отримання необхідних якісних показників і стану робочої рідини. У гідравлічних приводах застосовуються такі види кондиціонерів: відокремлювачі твердих частинок, сапуни, повітровідокремлювачі, повітровипускники і теплообмінники. |
|
Гідравлі́чний двигун (гідродвигун) — гідравлічна машина, що перетворює механічну енергію рідини на механічну енергію веденої ланки (вала, штока та ін.). Об'ємні гідравлічні двигуни, котрі діють від гідростатичного напору в результаті наповнення рідиною робочих камер і переміщення витискачів (під витискачем розуміється робочий орган, що безпосередньо здійснює роботу в результаті дії на нього тиску рідини, виконаний у вигляді поршня, пластини, зуба шестерні тощо). Гідроцилі́ндр - об'ємний гідродвигун зі зворотно-поступальним рухом вихідної ланки. Основним видом гідроциліндра є гідроциліндр поршневого типу. Часто до групи гідроциліндрів відносять, також, плунжерні, мембранні і сильфонні гідро- (пневмо-) двигуни. |
|
Принципова схема гідроприводу |
|
Гідравлічний привод характеризується:
|
|
Загальні терміни та визначення Гідропривод (гідросистема) - це сукупність гідропристроїв (гідромашин і гідроапаратів), призначених для передачі механічної енергії і перетворення руху за допомогою рідини. |
|
Гідравлічним акумулятором називається пристрій для накопичення (акумулювання) в працюючій гідросистемі енергії стиснутої рідини з наступним поверненням її (при певних режимах роботи) у гідросистему. Оскільки рідина знаходиться під тиском, з гідроакумуляторами поводяться як з напірними резервуарами, і вони повинні бути розраховані на використання в умовах максимального робочого надлишкового тиску, з урахуванням типових умов приймання країни, де вони експлуатуватимуться. |
|
Аксіально-поршневі гідромашини - це один з видів роторних гідромашин у яких осі поршнів паралельні осі обертання ротора або утворюють з нею кут менший 45°. Аксіально-поршневі гідромашини бувають із похилим диском і з похилим блоком циліндрів, бескарданні і з карданною передачею, з обертовим і нерухливим блоком циліндрів. |
|
Пластинчасті насоси: основні відомості Пластинчастий насос, різновид об'ємного роторного насоса, робочими органами якого є ротор, що обертається в ексцентрично розточеному статорі, і пластинки, вставлені в подовжні пази ротора і притискувані до статора відцентровою силою, пружинами або тиском рідини, осі ротора, що підводиться з боку. Інколи такий насос називають також діафрагмовий насос. Пластинчасті гідронасоси – це гідромашини, в яких роль витискувача робочої рідини виконують радіально розміщені плаcтини, які здійснюють зворотно-поступальні рухи при обертанні ротора. Пластинчасті насоси мають низький рівень шуму і хорошу рівномірність подачі. Також ці насоси мають відносно великі робочі об’єми при невеликих габаритах. Пластинчасті гідронасоси можуть працювати на тиску до 21 МПа при частоті обертання 150 об/хв. Пластинчаті насоси - забезпечують рівномірну, і спокійну подачу масла на виході, ці насоси можуть використовуватися для дозування. В якості регулюючого пристрою застосовуються гідравлічні та механічні регулятори. Рекомендовані частоти обертання приводу, зазвичай, лежать в межах 900-1800 об / хв . |
|
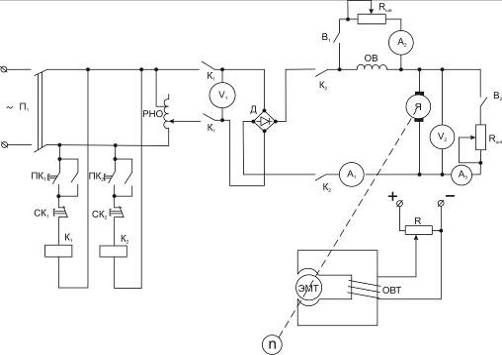
Типова схема стенда і робочі характеристики для дослідження методів регулювання швидкості ДПСПЗ
|
|
Електропривод постійного струму цифровий ЕПУ ЕПУ7 - це цифровий електропривод постійного струму на базі сигнальних процесорів, замінює аналогові електроприводи ЕПУ1М, ЕПУ1, БТУ, ЦЮ, БУВ і ін.
Пристрій поєднує в одному виконанні наступні можливості:
|

|
Типові схеми для дослідження механічних характеристик ДПС
|
|
Асинхронний двигун забезпечує наступні режими гальмування: 1) Рекуперативне (генераторне) гальмування; 2) Гальмування противмиканням; 3) Динамічне гальмування; 4) Гальмування із самозбудженням.
|
|
Маркіровка електродвигунів
|
|
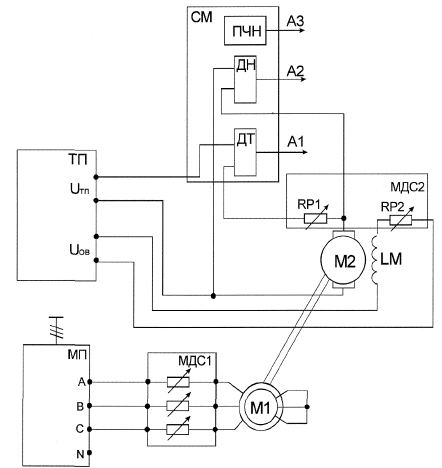
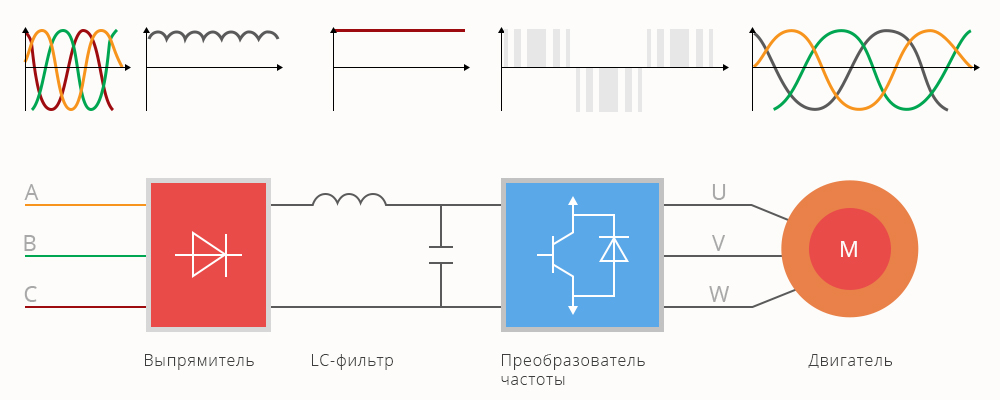
Система "частотний перетворювач – двигун"
|
|
Приклади використання логічних елементів в СКЕП
|
|
Замкнені схеми керування електропривода з ДЗС |
|
Замкнені схеми керування електропривода з ДПС |
|
Типові схеми лабораторних стендів для дослідження характеристик ДПСПЗ наведено нижче: |
|
Безконтактний трьохполюсний тиристорний пускач
|
|
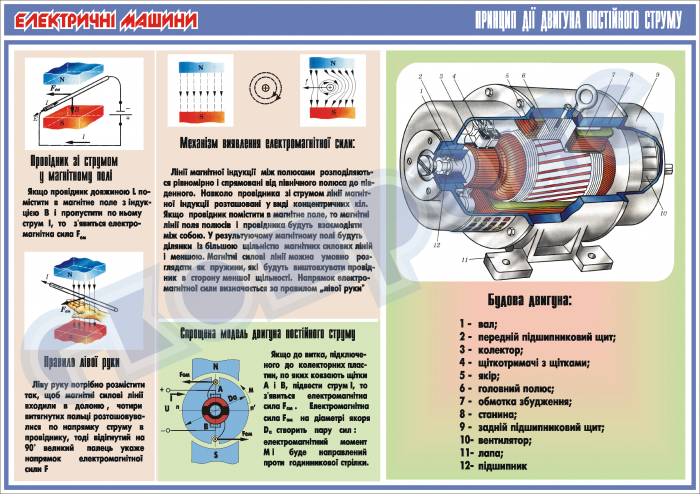
Двигун постійного струму, на відміну від двигунів змінного струму, живиться від джерела постійного струму. Магнітне поле статора створюється нерухомими постійними магнітами, а на роторі (інакше – якорі) розташована обмотка. Якір жорстко з’єднаний з валом і може обертатися довкола свої осі. Таким чином, конструктивно двигун постійного струму є оберненою синхронною машиною. |
|
Навожу типові приклади слайдів для оформлення РРТ презентації |
|
Кліматичне виконання, ступінь захисту, категорія розміщення електродвигунів |
|
Розглянемо електродвигуни з покращеними характеристиками. Ні для кого не секрет, що українська економіка є однією з найенергоємніших економік світу. Проблема енергозбереження для України особливо актуальна.
|
|
При необхідності керування положенням валу електродвигуна або вихідного валу механізму, енкодер підключається до зовнішнього програмованого логічного контролера (ПЛК), а з цього контролера подається сигнал завдання за швидкістю на перетворювач частоти. Ця система керування є досить популярною, проте вона має декілька суттєвих недоліків:
Іншим підходом є використання спеціалізованих перетворювачів частоти, що забезпечують керування положенням асинхронного двигуна із інкрементальним енкодером. Особливістю цих перетворювачів є програмна реалізація трьохконтурної системи підпорядкованого керування координатами електропривода, а саме положенням, швидкістю та моментом двигуна. Наприклад, у перетворювача частоти 8400 Vector Highline від компанії Lenze така система керування наглядно представлена при підключенні до ПК у програмному забезпеченні L-force Engineer за допомогою адаптера інтерфейсів. |
|
Схема керування пуском асинхронного двигуна з фазним ротором у функції часу |
|
Схема керування асинхронним електродвигуном у функції шляху |
|
Схема реверсивного керування асинхронним електродвигуном |
|
Схема нереверсивного керування асинхронним електродвигуном |
|
Структурна схема МПС |
|
Схема системи ТПН-Д з підлеглим регулюванням |
|
Схема динамічного гальмування двигуна постійного струму паралельного збудження у функції ЕРС |
|
Схема динамічним гальмуванням двигуна постійного струму паралельного збудження у функції часу |
|
Схема керування пуском двигуна постійного струму паралельного збудження у функції струму |
|
Схема керування пуском двигуна постійного струму паралельного збудження у функції ЕРС |
|
Схема керування пуском двигуна постійного струму паралельного збудження у функції часу |
|
Схема пуску та динамічного гальмування трифазного асинхронного електродвигуна з короткозамкненим ротором |
|
Схема керування асинхронним електродвигуном з автоматичним гальмуванням притивмиканням |
|
Схема керування однофазним двигуном |
|
Схема безступінчастого керування трифазним асинхронним електродвигуном |
|
Схема керування двошвидкісним електродвигуном |
|
Схема керування пуском асинхронного двигуна з фазним ротором у функції частоти струму ротора |
|
Схема керування пуском асинхронного двигуна з фазним ротором у функції струму |
|
Схема керування пуском асинхронного двигуна з фазним ротором у функції часу |
|
Схема керування трифазним асинхронним електродвигуном з перемиканням обмотки статора iз «зірки» на «трикутник» при пуску |